


VL53L8CX搭載 ToF 8×8ゾーン 距離センサ(400 cm)
送料区分: 200
商品コード: POLOLU-3419
発売日: 2024-04-25
在庫数: 23
短いURL: ssci.to/9637
ST社のレーザー測距センサ VL53L8CX を使った距離センサです。I2CまたはSPI経由で最大 4 mまで高速かつ正確に測定できます。
マルチゾーンで複数ターゲットへの距離を同時測定し、解像度 8 x 8 までのデプスマップデータを提供します。以前のバージョンと比べて、周辺光での性能が改善されています。
電圧レギュレータとレベルシフタを搭載、入力電圧 3.2 ~ 5.5 Vで動作します。ピンは2.54 mmピッチで、ブレッドボードやユニバーサル基板を簡単に使用できます。
注意:
VL53L8CX の初期化と読み取りデータ処理には、大量のRAM/コードスペースが必要(90 KB以上のプログラムメモリ)となるので、8 bitマイコンでの使用は非推奨です。VL53L1X、 VL53L0X、VL6180X 搭載モジュール(マルチゾーン/マルチターゲットには非対応)をご検討ください。
概要
VL53L8CXは 940 nm クラス1レーザーを内蔵した小型の3D LiDARシステムです。物体距離を推定するのに反射光の強さを利用する従来のIRセンサとは異なり、ST社のFlightSenseテクノロジーを使用、赤外線レーザ光パルスが物体に到達し、反射して戻ってくるまでの時間を正確に測定します。この手法は周辺光の条件や色、形状、テクスチャー、反射率などのターゲット特性には依存せず(センサの最大距離範囲には影響)、絶対距離を測定します。
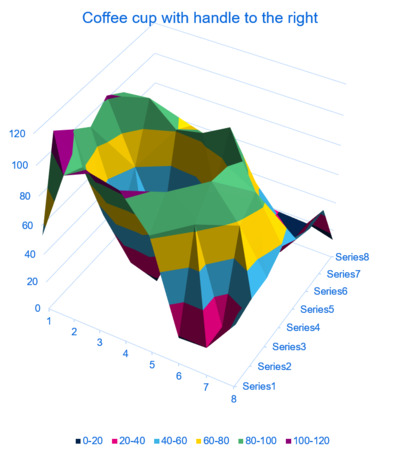
VL53L8CX は、ベーシックモデルのToFセンサとは異なり、視野を4 x 4 または 8 x 8のグリッドのゾーンに分割して、ゾーン毎にマルチターゲットを含む個別の測定値を読み取るマルチゾーン測距出力を行います。つまり、単一の距離計測を行うのではなく、低解像度デプスマップを作成することができます。
以下はVL53L8CXと同種期のを持つVL53L5CXで作成したマップの画像例です。
特徴
- 測距範囲: 2~400 cm
- エミッタ:940 nm 不可視光 Class 1 VCSEL(Vertical-Cavity Surface-Emitting Laser)
- 検出器:SPADS(Single Photon Avalanche Diode)受光アレイ
- 視野角(FoV):65° 対角 (45° 水平/垂直)
- 出力フォーマット(I2C/SPI):ヒストグラム
- 動作電圧:3.2~5.5 V
- 電源電流:約 100 mA(デフォルト設定、アクティブ測距中の平均電流値)
- ピーク電流: 150 mA
- 寸法:13 × 23 × 3 mm
- 重量:0.7 g (ヘッダピン除く)
VL53L8CXの使用
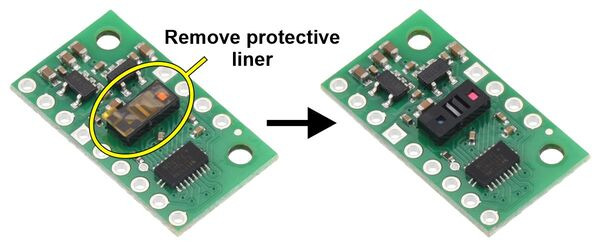
注意:センサ保護ライナーがついている場合は、はがしてご使用ください。
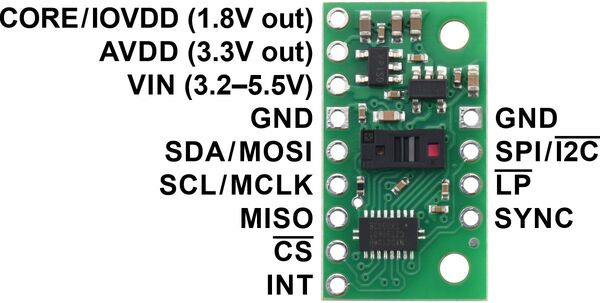
ピン配置
| PIN | Description |
|---|---|
| CORE/IOVDD | 安定化1.8 V出力。最大約50 mA給電可。 |
| AVDD | 安定化3.3 V出力。最大約220 mA給電可。 (VIN < 3.4 Vでは、AVDD < 3.3 Vになるが、AVDD 3.13 Vまで動作可) |
| VIN | 3.2 ~ 5.5 V の電源に接続。レベルシフタ―は全IOラインをこのレベルにセット。(デフォルトはプルアップ) |
| GND | 0 Vに接続。 I2C または SPI の制御ソースはこのボードの共通グランドをシェアする必要あり |
| SDA/MOSI | レベルシフト後の I2C/SPI データ。 |
| SCL/MCLK | レベルシフト後の I2C/SPI クロック。 |
| MISO | レベルシフト後の SPIデータ出力。 |
| CS | レベルシフト後の SPI イネーブル。(NCS)
アクティブロー。デフォルトはプルアップ。 立ち下りエッジでSPI通信開始。 |
| INT | レベルシフト後のプログラマブル割り込み出力。 |
| SPI/ I2C | レベルシフト後の SPI/I2Cモードセレクト。(SPI_I2C_N) デフォルトはプルアップでSPIモードを選択。 ローで I2C モード。トグルで I2Cインターフェースをリセット。 |
| LP | レベルシフト後のI2C ディスエイブル入力。(LPn) アクティブロー。デフォルトはプルアップ。 プルダウンで I²C 通信ディスエイブル。 I²C アドレス変更時に使用。 |
| SYNC | レベルシフト後の 外部同期ピン。 立ち上がりエッジでシングルショット測距可能。 |
注意:VL53L8CXモジュールのレベルシフタは、 外部負荷に敏感です。 できるだけ短く(理想的には8 cm以下)配線する、他のデバイスをI2C/SPIバスに追加しないなどを行ってください。また、レベルシフタによる発振がある場合、インターフェースラインに数10 pF程度のコンデンサを追加してください。
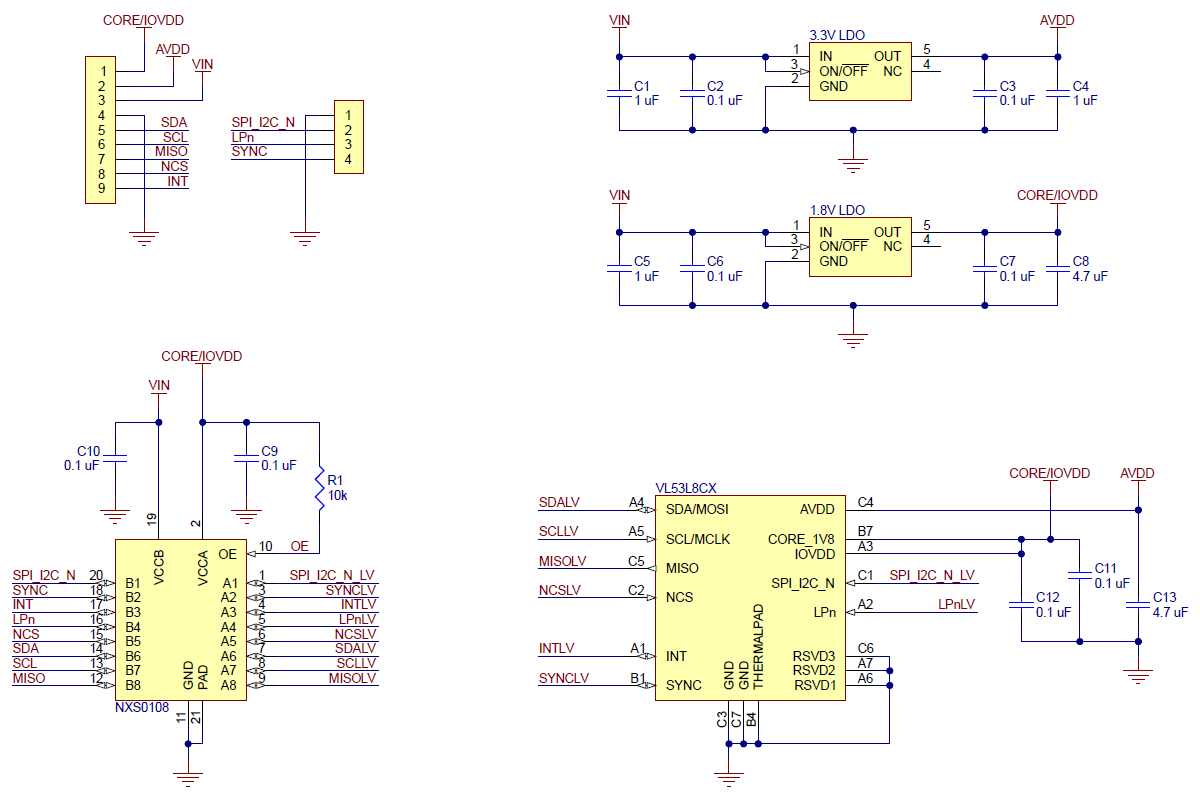
回路図
Pololu ST ToFセンサ
 VL6180X
VL6180X
|
 VL53L0X
VL53L0X
|
 VL53L1X
VL53L1X
|
 VL53L3CX
VL53L3CX
|
 VL53L5CX
VL53L5CX
|

|  VL53L8CX VL53L8CX
|
|
| 測距範囲: | 約1 cm~60 cm | 約3 cm~200 cm | 4 cm~400 cm | 1 cm~500 cm | 2 cm~400 cm | 2 cm~350 cm | 2 cm~400 cm |
| 視野角: | 25° | 25° | 15° ~ 27° | 25° | 65°/最大8×8 ゾーン | 90°/最大8×8 ゾーン | 65° /最大8×8 ゾーン |
資料
- 基板回路図(PDF)
- 基板寸法図(PDF)
- 基板3Dモデル(STEPダウンロード)
- 基板ドリルモデル(DXFダウンロード)
- UM3109マニュアル : A guide to using the VL53L8CX multizone Time-of-Flight ranging sensor with wide field of view Ultra Lite Driver(PDF)
- UM10204 I²C-busマニュアル(PDF)
- VL53L8CXドキュメンテーション
- Ultra lite driver (ULD) API for the VL53L8CX low-power, high-performance, 8x8 multizone Time of-Flight sensor
製造元希望小売価格 : 24.95ドル(税別)
製造元の販売ページ : https://www.pololu.com/product/...
商品コード: POLOLU-3419